Schalal
3D SGG
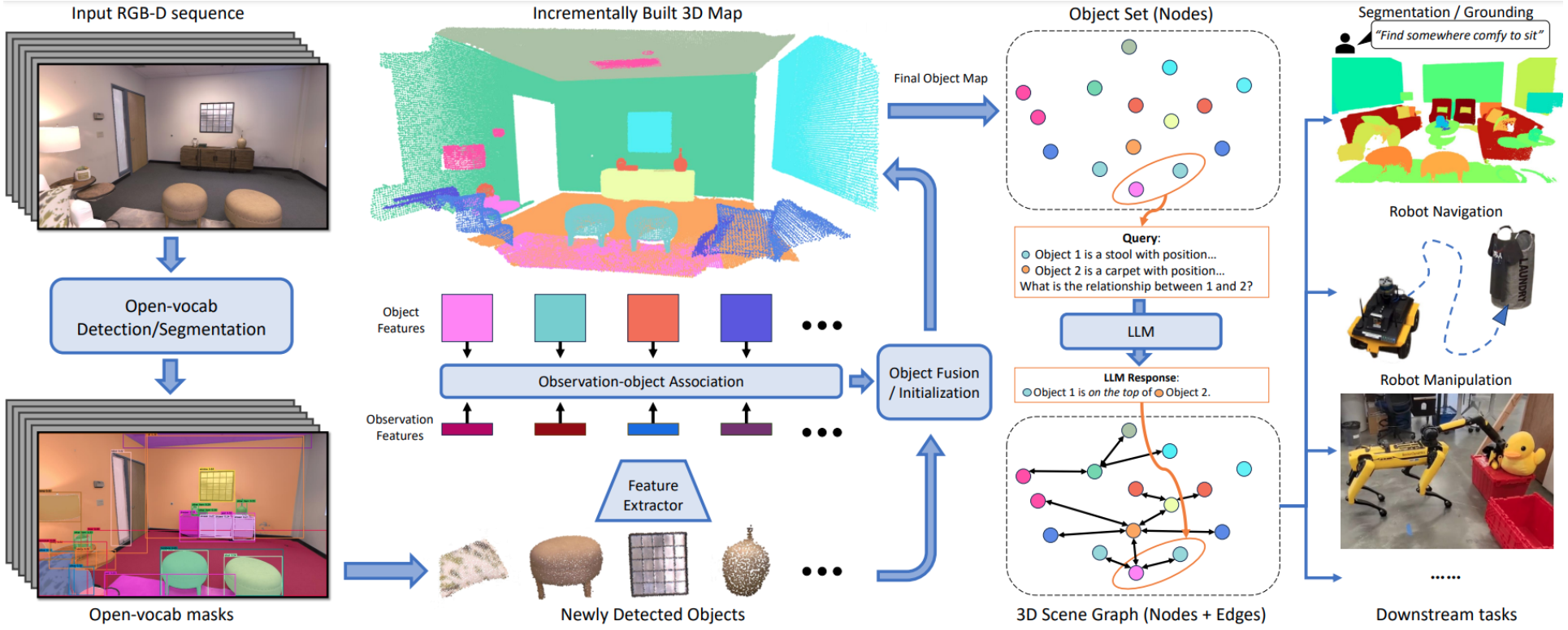
ConceptGraphs: Open-Vocabulary 3D Scene Graphs for Perception and Planning
- input data: a sequence of posed RGB-D images.
- use generic instance segmentation models to segment regions from RGB images
- extract semantic feature vectors for each
- project them to a 3D point cloud
- associate regions and fuse regions from multiple views, and get a set of 3D objects and associated vision (and language) descriptors
- use large vision and language models to caption each mapped 3D objects and derive inter-object relations
- use generated the edges to connect the set of objects and form a graph
The resulting 3D scene graph provides a structured and comprehensive understanding of the scene and can further be easily translated to a text description, useful for LLM-based task planning.
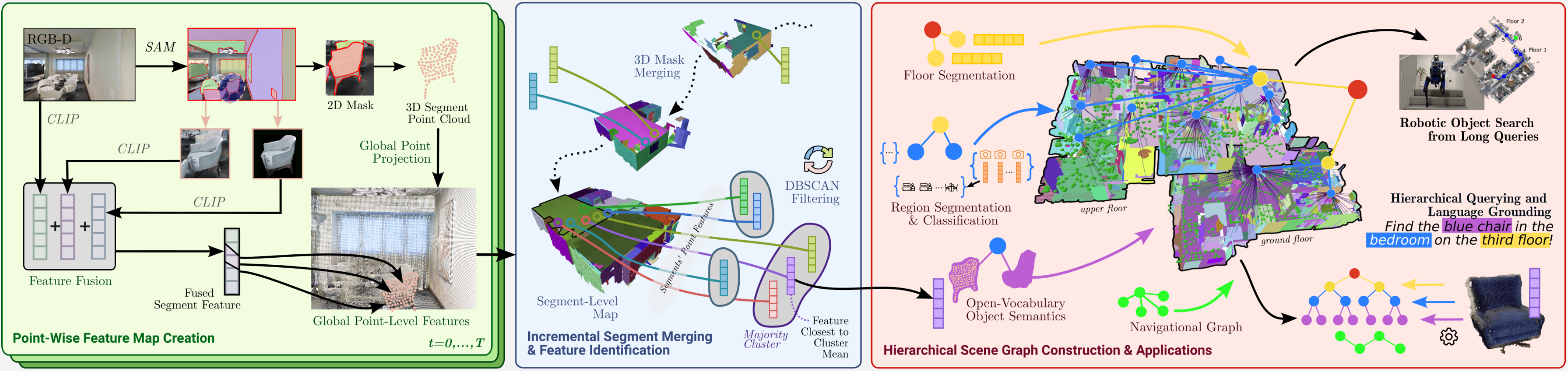
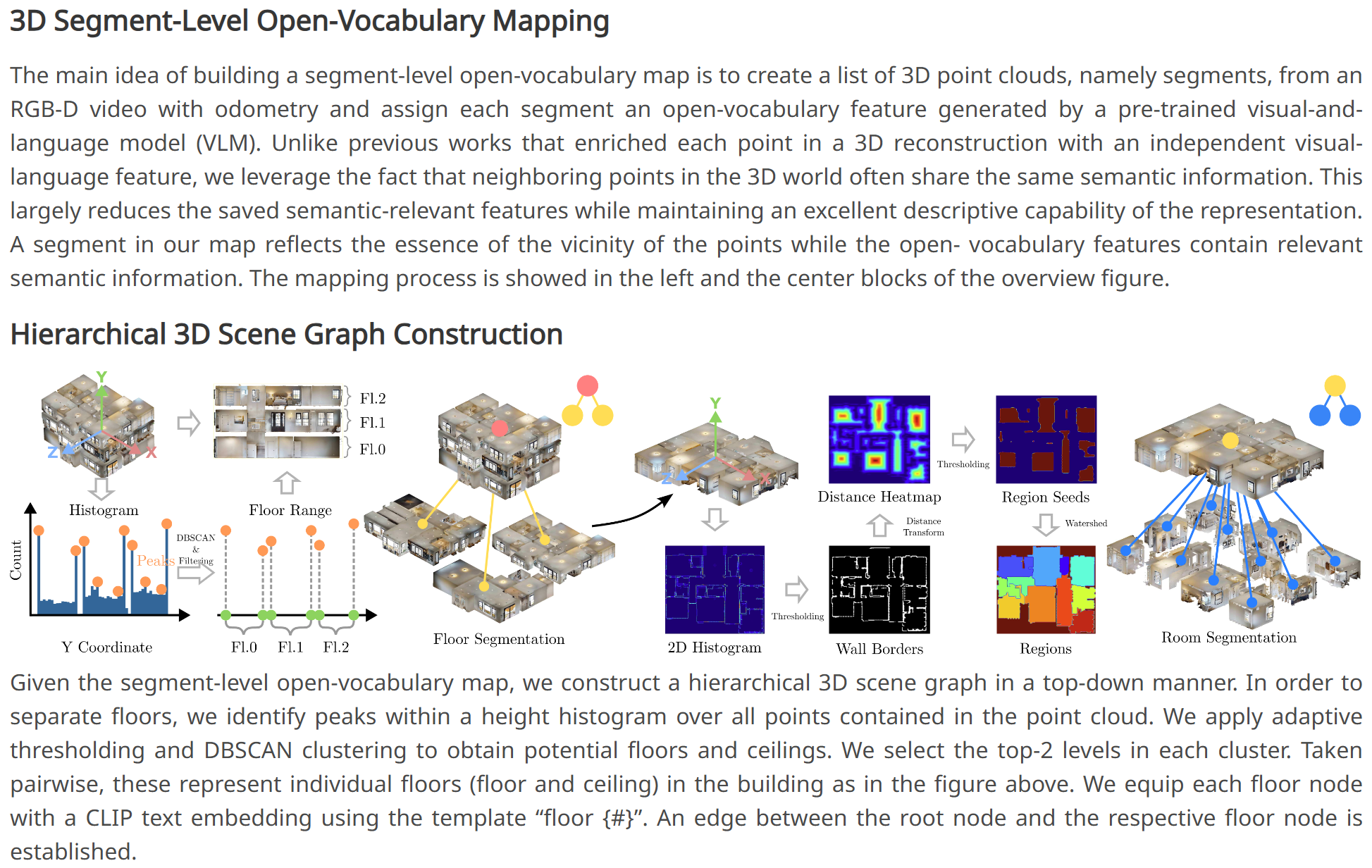
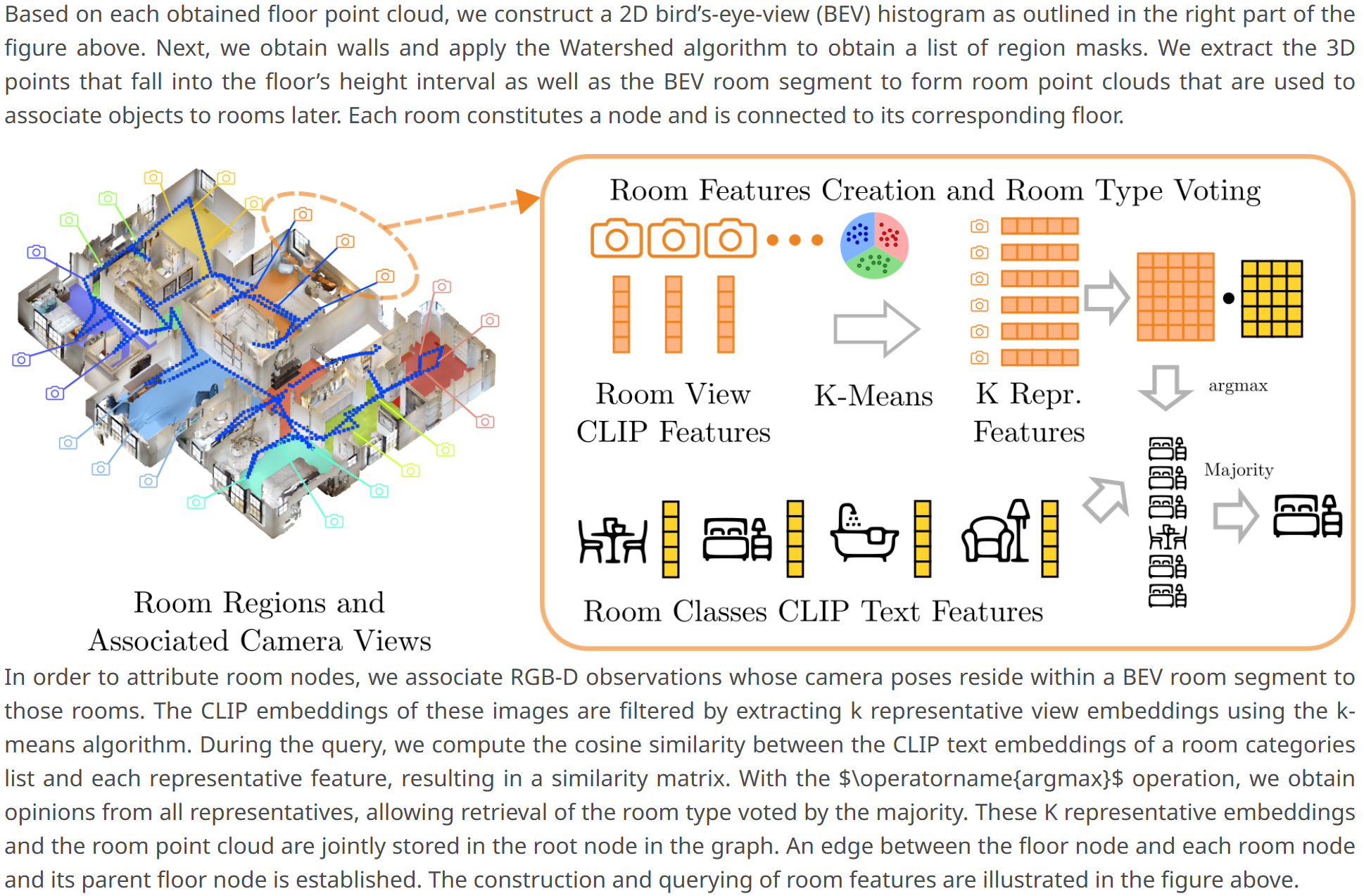
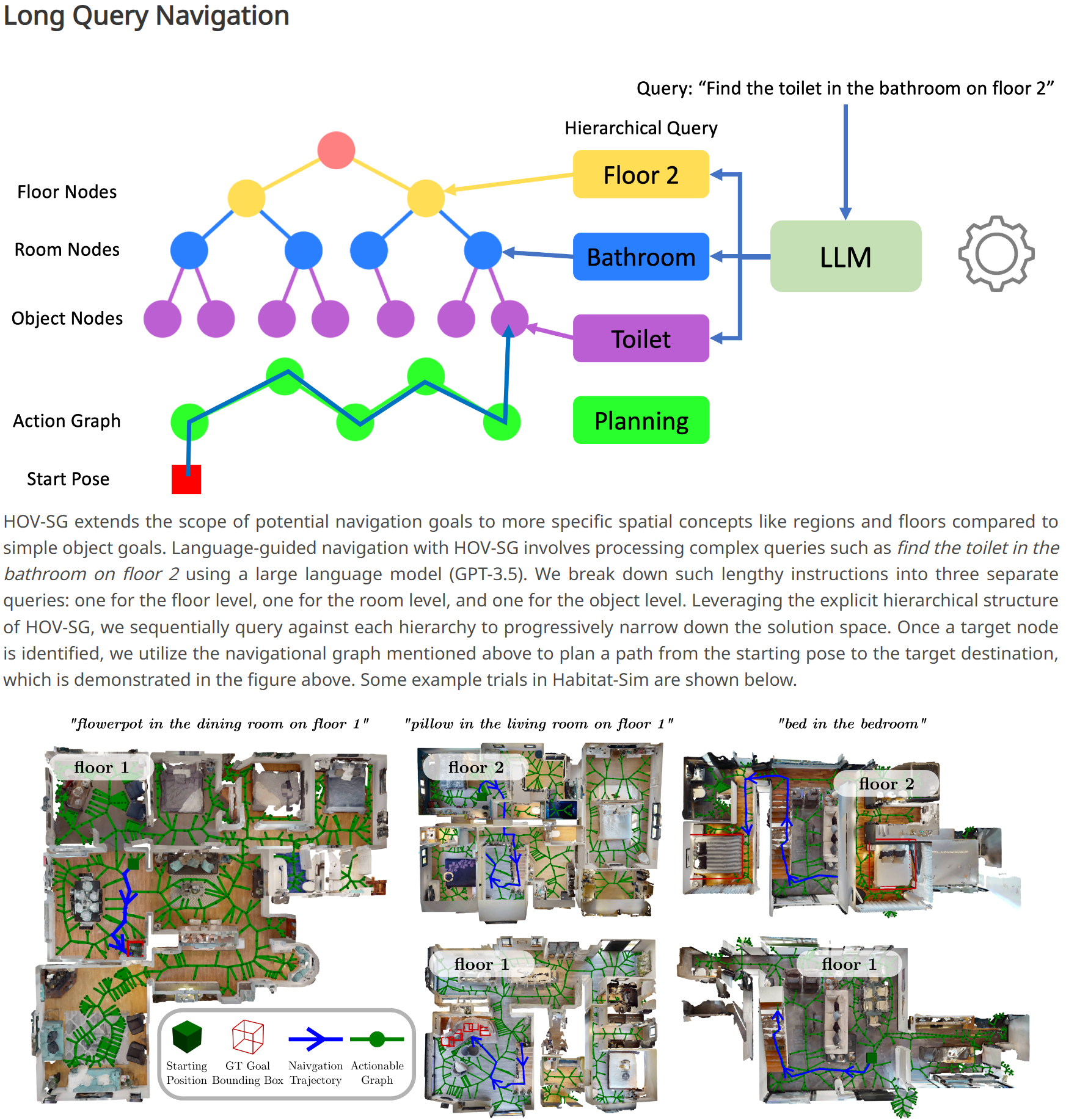
Hierarchical Open-Vocabulary 3D Scene Graphs for Language-Grounded Robot Navigation